近日,北京航空航天大学成人直播
机器人研究所的丁希仑教授团队在机器人领域知名期刊《The International Journal of Robotics Research》上发表了题为“Bionic jellyfish robot achieving enhanced steering maneuverability through asymmetric tentacles”的研究论文,北京航空航天大学为第一完成单位。
水母以其柔性身体与低能耗的波动推进能力,在海洋生物中具备独特优势。为实现高效、柔顺且具方向控制能力的仿生水下机器人运动模式,本研究提出了一种基于不对称触手摆动机制的仿生水母机器人。该机器人通过左右触手振幅差异产生转矩,从而实现精确转向,无需额外螺旋桨或舵面结构,大幅提高了结构紧凑性与能效比。
本研究提出了一种基于伞状柔性主体与嵌入式偏心凸轮驱动系统的仿生水母机器人,整机质量仅287 g,结构紧凑且能耗极低。实验结果显示,该机器人最高游速可达7.5 cm/s(约0.47 BL/s),在不依赖螺旋桨或舵面的情况下实现了最高200°的转向幅度与22.7°/s的转向角速度。相比现有仿生水母机器人,本系统在生物式转向控制、轻量化设计与推进能效方面实现了显著提升,证明不对称触手驱动机制在水下高机动仿生推进领域的可行性与优势。本文系统介绍了其结构设计、力学模型与实验验证,并探讨了其在水下生态探测、隐匿巡航与柔性水下平台等方向的应用前景。
(一)灵感来自水母:用最“省力”的方式游泳
作为海洋生态系统中重要的漂浮性捕食者与能量传递节点,水母以其柔顺游动、低能耗推进和高机动控制能力在海洋环境中发挥着关键作用。与多数水下生物依赖尾鳍摆动或鳍面调节实现转向不同,水母通过伞体周期性收缩与触手协同摆动实现推进,当触手摆动幅度出现不对称时即可产生不均匀流场与偏置推力,从而完成高效而自然的方向调节。这种无需复杂关节与鳍面的柔性不对称驱动体现了水母独特的生物力学优势。受此启发,研究团队设计了一款仅重287 g、直径11 cm的仿生机器人,采用圆柱形凸轮机构驱动六根触手,模拟水母的“喷射推进”动作。外部覆盖一层高弹性硅胶膜,不仅防水耐腐蚀,还能增强推进效率。
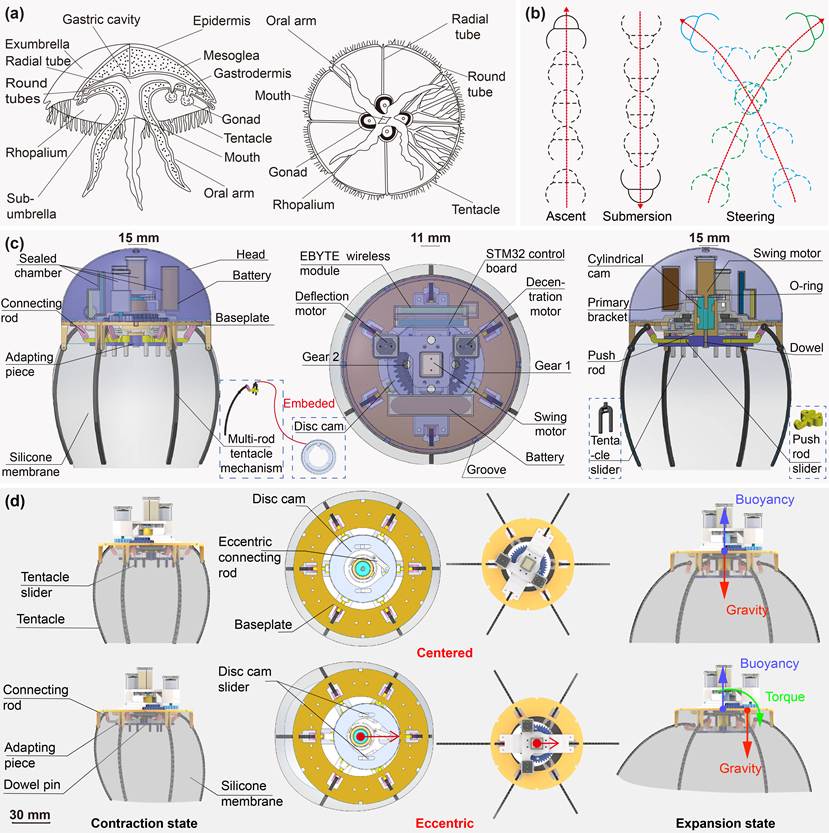
图1 从水母到机器人系统的仿生映射
(二)不对称触手:灵活转向的关键
传统水下机器人转向多依赖重心调整或多舵机控制,结构复杂、响应慢。而这个“机械水母”采用了一种更聪明的策略:通过偏心圆盘凸轮,实现触手的不对称摆动,从而产生偏转力矩,完成转向。简单来说,它就像用“划水”方式控制方向,不需要额外舵机,结构更紧凑,反应也更灵敏。
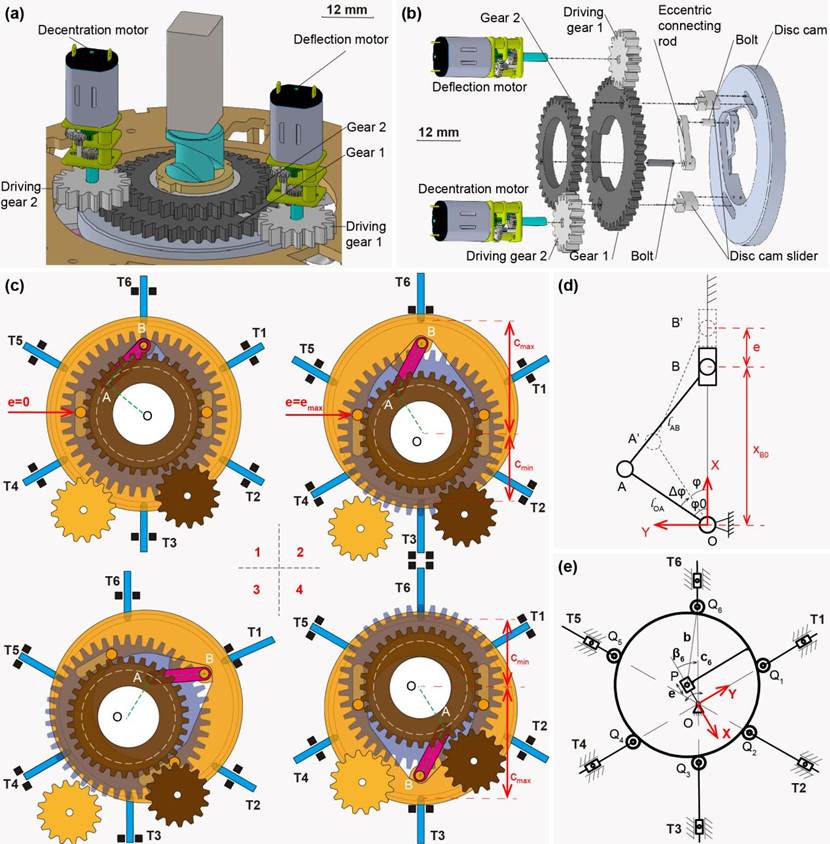
图2 转向机构与操作机理
1、怎么产生“不对称”?
研究团队巧妙地利用一个偏心圆盘凸轮来实现触手的不对称运动:这个凸轮的旋转中心与机器人的几何中心错开了一段距离e(0–5 mm可调),而在凸轮圆周上均匀分布着六个滑块-推杆,每一个都连接着一条触手。当偏心距e为0时,六个滑块的高度一致,触手摆动幅度相同,机器人直线前进;当e增大到 5 mm 时,滑块在凸轮上的位置出现周期性高度差,导致触手摆幅呈现出类似正弦的分布规律,从而使得一侧推力增强、另一侧减弱,机器人便在这种非对称推力的作用下迅速发生偏转。
2、怎么指哪转哪?
要让机器人朝任意方向灵活转向,关键在于控制凸轮的偏心方向和偏心大小。论文中提出了一个“双电机协同”控制策略:偏置电机负责将凸轮推离中心,决定转向的“幅度”;偏转电机则带动整个凸轮绕中心轴旋转,决定转向的“方向”。两者通过固定齿轮比同步运转,使得凸轮可以在360°范围内任意方向维持相同的偏心距,从而实现全向矢量推进。这种设计相当于把传统舵机的功能“藏”进了触手内部,无需外部舵面或复杂连杆机构,既节省空间,又大幅提升响应速度与结构紧凑性。
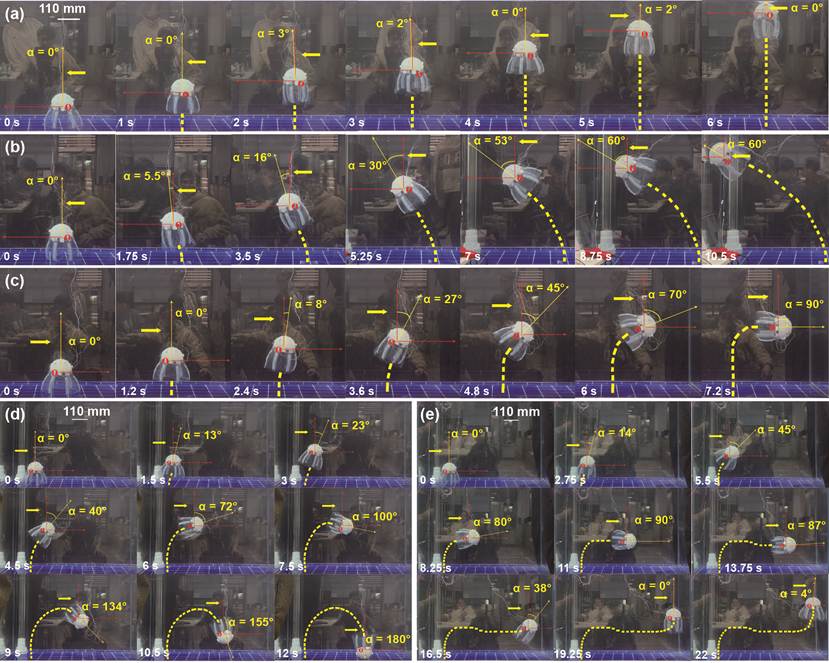
图3 水缸运动实验
(三)多场景实验验证:稳定推进、精准转向与生态友好表现
为全面验证仿生水母机器人在不同环境下的运动性能与适应能力,在室内与户外两类水域开展多场景测试。结果表明,该机器人在从受控条件到开放自然水体中均能实现稳定推进与灵活机动,并在实际生态环境中表现出极低扰动特性。
室内水缸测试:精细操控与复杂机动动作验证。如图3所示,在室内水缸实验中,机器人完成了垂直升降、90°、180°与S形穿行等多项机动动作,展现出优良的姿态稳定性与方向响应能力。
户外水域测试:生态友好航行与开放场景稳定性。在户外真实水域中,机器人分别在公园生态池塘与开放泳池中进行了测试。如图4所示,在生态池塘中,面对、底泥扰动、自然水流及自由鱼群干扰等条件,机器人仍保持稳定航迹。得益于柔性触手推进方式,运行噪声低于30 dB,未引起鱼群警觉,实现近似“零扰动”航行。在更开阔的户外泳池环境中,机器人完成了长距离巡航与大角度转向任务,验证了其在中尺度环境下的稳定推进与航向保持能力。
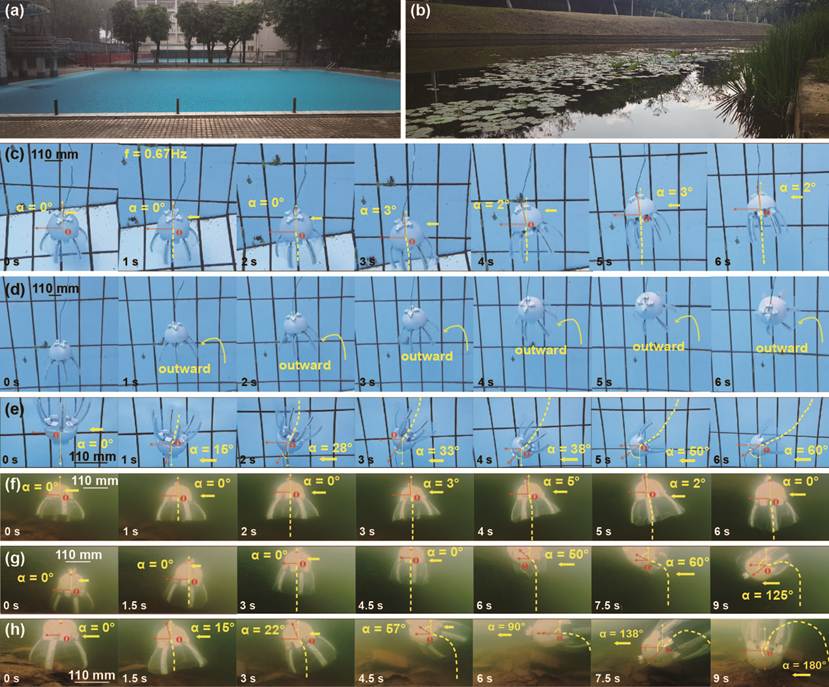
图4 泳池和生态环境运动实验
(四)总结与展望
与现有仿生水母机器人相比,本研究提出的不对称触手驱动方案在结构紧凑性、转向机动性、能耗控制与环境适应性方面均展现出明显优势。通过与已有水母机器人对比可以看出,本系统不仅实现了精确且连续的可控转向,还在重量、系统鲁棒性与生态扰动控制等方面取得兼优表现,进一步证明了不对称触手驱动在低噪音、小尺度与隐匿性水下机器人中的潜力。
该工作得到了广州市自然科学基金、国家自然科学基金、广东省自然科学基金、中国科协青年托举人才工程、北京市自然科学基金和中央高校基本科研业务费专项资金的支持。
论文链接://journals.sagepub.com/doi/abs/10.1177/02783649251377101
